VEX EDR Sections 1-4 Crossword
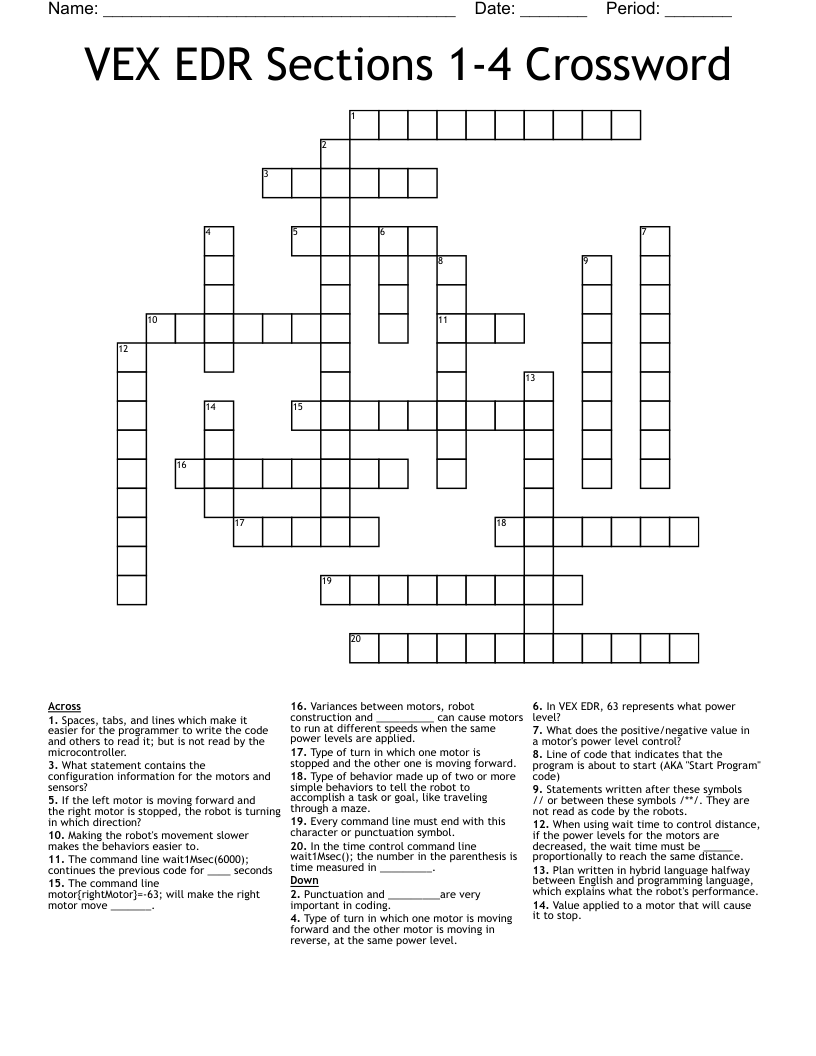
This printable crossword puzzle on the topic of Computer Science & Technology has 20 clues. Answers range from 3 to 14 letters long. This crossword is also available to download as a Microsoft Word document or a PDF.
Description
Type of turn in which one motor is stopped and the other one is moving forward.
Type of turn in which one motor is moving forward and the other motor is moving in reverse, at the same power level.
The command line wait1Msec(6000); continues the previous code for ____ seconds
Value applied to a motor that will cause it to stop.
In VEX EDR, 63 represents what power level?
Variances between motors, robot construction and __________ can cause motors to run at different speeds when the same power levels are applied.
Making the robot's movement slower makes the behaviors easier to.
Every command line must end with this character or punctuation symbol.
In the time control command line wait1Msec(); the number in the parenthesis is time measured in _________.
The command line motor{rightMotor}=-63; will make the right motor move _______.
What statement contains the configuration information for the motors and sensors?
Punctuation and _________are very important in coding.
Plan written in hybrid language halfway between English and programming language, which explains what the robot's performance.
Line of code that indicates that the program is about to start (AKA "Start Program" code)
Spaces, tabs, and lines which make it easier for the programmer to write the code and others to read it; but is not read by the microcontroller.
Type of behavior made up of two or more simple behaviors to tell the robot to accomplish a task or goal, like traveling through a maze.
Statements written after these symbols // or between these symbols /**/. They are not read as code by the robots.
What does the positive/negative value in a motor's power level control?
When using wait time to control distance, if the power levels for the motors are decreased, the wait time must be _____ proportionally to reach the same distance.
If the left motor is moving forward and the right motor is stopped, the robot is turning in which direction?